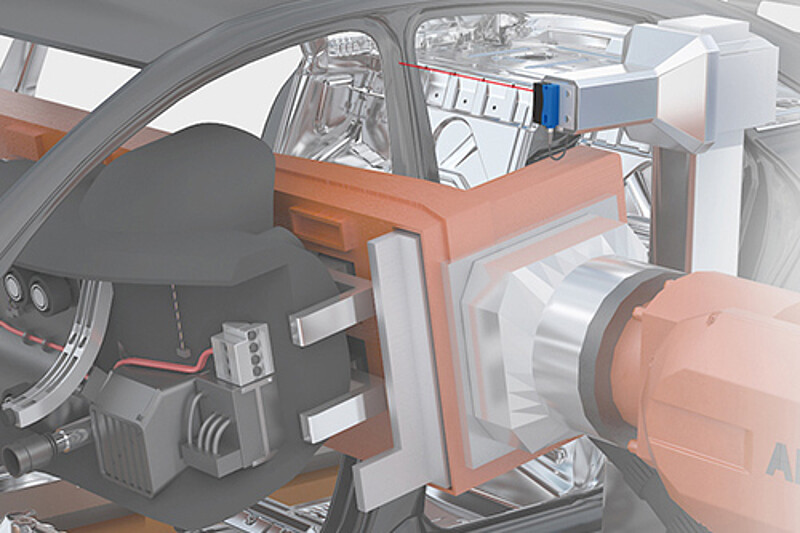
























































































로봇 포지셔닝 작업에 활용하기 위한 거리 측정
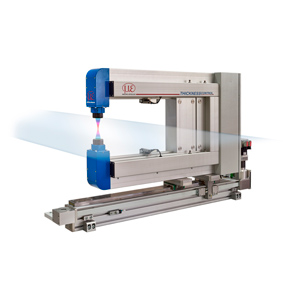
차체가 정확한 지점에 정지해야 로봇이 원활하게 조립 작업을 수행할 수 있습니다. 특히, 로봇이 A 필러와 B 필러 사이로 콕핏을 차량 내부로 이동시키는 과정에서 차체가 올바른 위치에 정지해야 합니다. 이를 위해 Micro-Epsilon사의 TOF 레이저 센서 optoNCDT ILR1030-8/LC1이 사용되며, 짧은 응답 시간을 갖추고 있어 이러한 작업뿐만 아니라 유사한 어플리케이션에서도 뛰어난 성능을 제공합니다. 센서는 콕핏 조립을 수행하는 로봇과 동일한 측면의 조립 라인에 설치되며, 차량의 A 필러와 B 필러 높이에서 약 600 ~ 700 mm 거리에서 측정을 수행합니다. 또한, 초당 100회 (100 Hz)측정을 통해 차체의 정확한 위치를 파악하여 정밀한 조립이 이루어질 수 있도록 합니다.